Embodied intelligence for sustainable flight: a soaring robot with active morphological control - npj Robotics
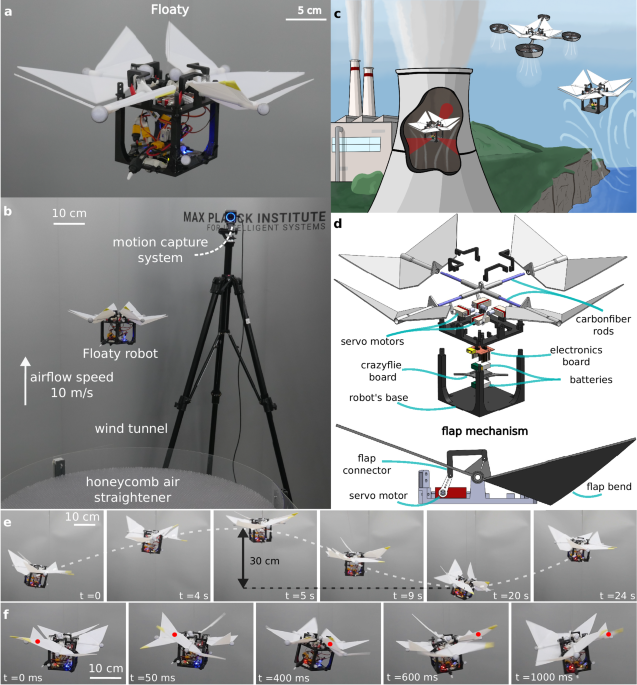
Research on “embodied intelligence” for sustainable flight highlights Floaty, a soaring robot that can fly passively in rising air without onboard thrust. The study, published by npj Robotics, describes a design optimized aerodynamically and controlled by dynamically rotating four control surfaces. By adjusting flap angles, the robot modulates its aerodynamic profile to manage drag forces, enabling stabilization, hovering, and maneuvering primarily using energy drawn from external wind. Floaty’s passive flight relies on drag generated by a central base and four independently actuated thin-plate flaps, with a simplified drag model evaluated against experimental data for operationally relevant flap angles. The paper also outlines a control allocation approach using orthogonal compound signals to map desired changes in roll, pitch, yaw, and vertical force to coordinated flap adjustments around a nominal hover configuration. The work frames morphological control as a practical alternative to thrust-based systems.






